
12.3C: Proprioceptive Sensations
- Page ID
- 7657
Proprioception refers to the sense of knowing how one’s body is positioned in three-dimensional space.
- Describe how propioception is the sense of the position of parts of our body in a three dimensional space
Key Points
- Proprioception is the sense of the position of parts of our body and force being generated during movement.
- Proprioception relies on two, primary stretch receptors: Golgi tendon organs and muscle spindles.
- Muscle spindles are sensory receptors within the belly of a muscle that primarily detect changes in the length of this muscle. They convey length information to the central nervous system via sensory neurons. This information can be processed by the brain to determine the position of body parts.
- The Golgi organ (also called Golgi tendon organ, tendon organ, neurotendinous organ, or neurotendinous spindle) is a proprioceptive sensory receptor organ that is located at the insertion of skeletal muscle fibers into the tendons of skeletal muscle.
Key Terms
- alpha motor neuron: Large, multipolar lower motor neurons of the brainstem and spinal cord that are directly responsible for initiating muscle contraction.
- proprioreceptor: A sensory receptor that responds to position and movement and that receives internal bodily stimuli.
- posterior (dorsal) column-medial lemniscus pathway: A sensory pathway of the central nervous system that conveys localized sensations of fine touch, vibration, two-point discrimination, and proprioception from the skin and joints.
- Law of Righting: A reflex rather than a law, this refers to the sudden movement of the head to level the eyes with the horizon in the event of an accidental tilting or imbalance of the body.
- Golgi tendon organ: A proprioceptive sensory receptor organ that is located at the insertion of skeletal muscle fibers into the tendons of skeletal muscle.
- muscle spindle: Sensory receptors within the belly of a muscle that primarily detect changes in the length of this muscle.
- proprioception: The sense of the position of parts of the body, relative to other neighboring parts of the body.
Proprioception is the sense of the relative position of neighboring parts of the body and the strength of effort being employed in movement. It is distinguished from exteroception, perception of the outside world, and interoception, perception of pain, hunger, and the movement of internal organs, etc.
The initiation of proprioception is the activation of a proprioreceptor in the periphery. The proprioceptive sense is believed to be composed of information from sensory neurons located in the inner ear (motion and orientation) and in the stretch receptors located in the muscles and the joint-supporting ligaments (stance).
Conscious proprioception is communicated by the posterior ( dorsal ) column–medial lemniscus pathway to the cerebrum. Unconscious proprioception is communicated primarily via the dorsal and ventral spinocerebellar tracts to the cerebellum.
An unconscious reaction is seen in the human proprioceptive reflex, or Law of Righting. In the event that the body tilts in any direction, the person will cock their head back to level the eyes against the horizon. This is seen even in infants as soon as they gain control of their neck muscles. This control comes from the cerebellum, the part of the brain that affects balance.
Muscle spindles are sensory receptors within the belly of a muscle that primarily detect changes in the length of a muscle. They convey length information to the central nervous system via sensory neurons. This information can be processed by the brain to determine the position of body parts. The responses of muscle spindles to changes in length also play an important role in regulating the contraction of muscles.
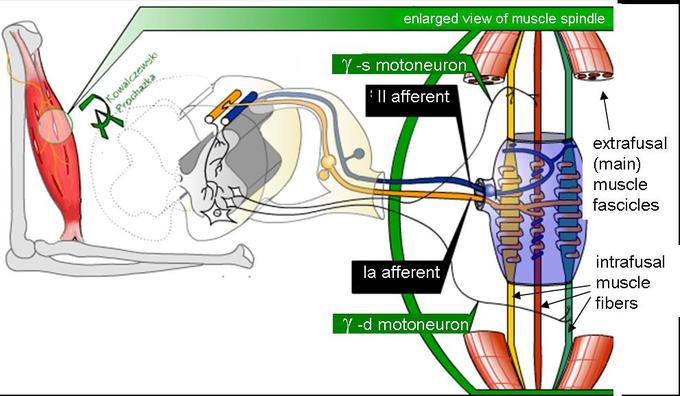
Muscle spindle: Mammalian muscle spindle showing typical position in a muscle (left), neuronal connections in spinal cord (middle), and expanded schematic (right). The spindle is a stretch receptor with its own motor supply consisting of several intrafusal muscle fibers. The sensory endings of a primary (group Ia) afferent and a secondary (group II) afferent coil around the non-contractile central portions of the intrafusal fibers.
The Golgi organ (also called Golgi tendon organ, tendon organ, neurotendinous organ or neurotendinous spindle) is a proprioceptive sensory receptor organ that is located at the insertion of skeletal muscle fibers onto the tendons of skeletal muscle. It provides the sensory component of the Golgi tendon reflex.
The Golgi organ should not be confused with the Golgi apparatus—an organelle in the eukaryotic cell —or the Golgi stain, which is a histologic stain for neuron cell bodies.
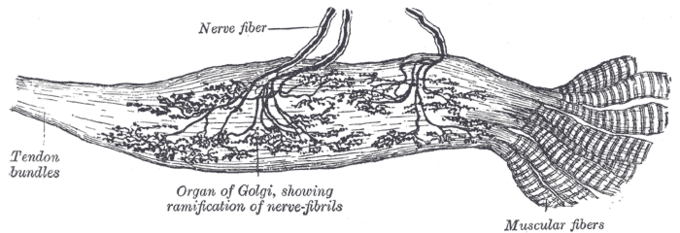
Golgi tendon organ: The Golgi tendon organ contributes to the Golgi tendon reflex and provides proprioceptive information about joint position.
The Golgi tendon reflex is a normal component of the reflex arc of the peripheral nervous system. In a Golgi tendon reflex, skeletal muscle contraction causes the agonist muscle to simultaneously lengthen and relax. This reflex is also called the inverse myotatic reflex, because it is the inverse of the stretch reflex.
Although muscle tension is increasing during the contraction, alpha motor neurons in the spinal cord that supply the muscle are inhibited. However, antagonistic muscles are activated.