6.3: Oriented Edge Detectors in Primary Visual Cortex
- Page ID
- 12598

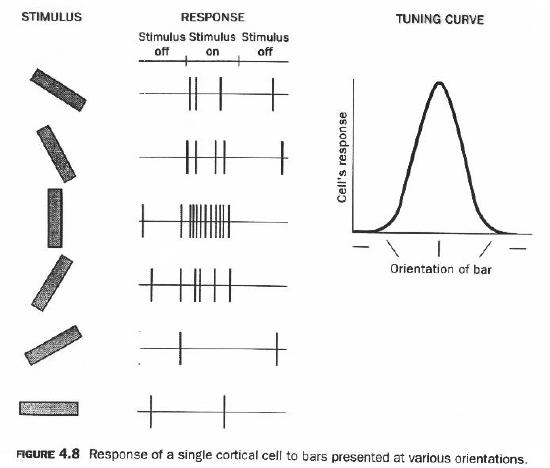
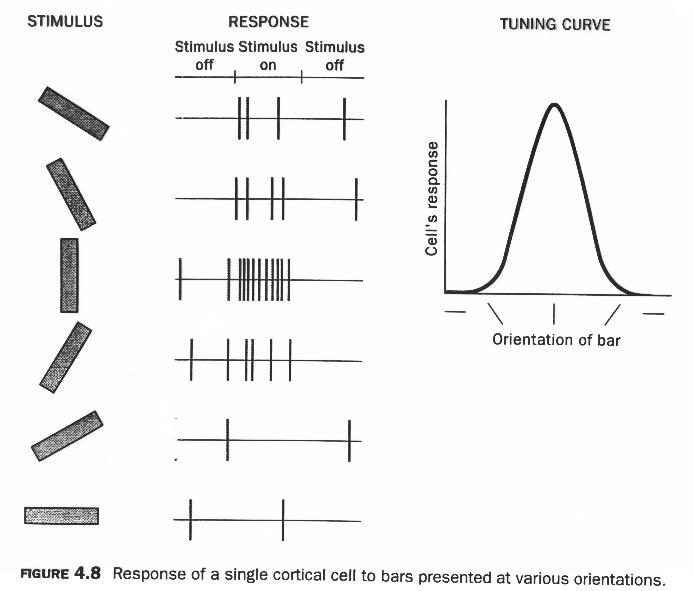
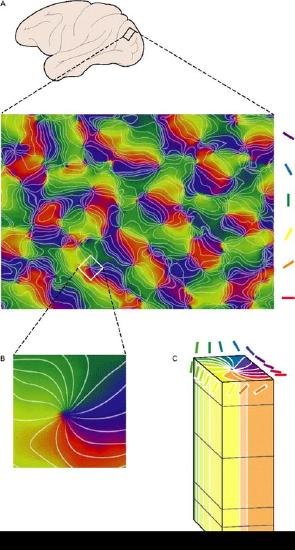
Neurons in primary visual cortex (V1) detect the orientation of edges or bars of light within their receptive field (RF -- the region of the visual field that a given neuron receives input from). Figure 6.7 shows characteristic data from electrophysiological recordings of an individual V1 neuron in response to oriented bars. This neuron responds maximally to the vertical orientation, with a graded fall off on either side of that. This is a very typical form of tuning curve. Figure 6.8 shows that these orientation tuned neurons are organized topographically, such that neighbors tend to encode similar orientations, and the orientation tuning varies fairly continuously over the surface of the cortex.
{kind=link}
{kind=link}
The question we attempt to address in this section is why such a topographical organization of oriented edge detectors would exist in primary visual cortex? There are multiple levels of answer to this question. At the most abstract level, these oriented edges are the basic constituents of the kinds of images that typically fall on our retinas. These are the most obvious statistical regularities of natural images (cite: Olshausen & Field, xx). If this is indeed the case, then we would expect that the self-organizing aspect of the XCAL learning algorithm used in our models (as discussed in the Learning Chapter) would naturally extract these statistical regularities, providing another level of explanation: V1 represents oriented edge detectors because this is what the learning mechanisms will naturally develop.
The situation here is essentially equivalent to the self organizing learning model explored in the Learning Chapter, which was exposed to horizontal and vertical lines, and learned to represent these strong statistical regularities in the environment.
However, that earlier simulation did nothing to address the topography of the V1 neurons -- why do neighbors tend to encode similar information? The answer we explore in the following simulation is that neighborhood-level connectivity can cause nearby neurons to tend to activate together, and because activity drives learning, this then causes them to tend to learn similar things.
Simulation Exploration
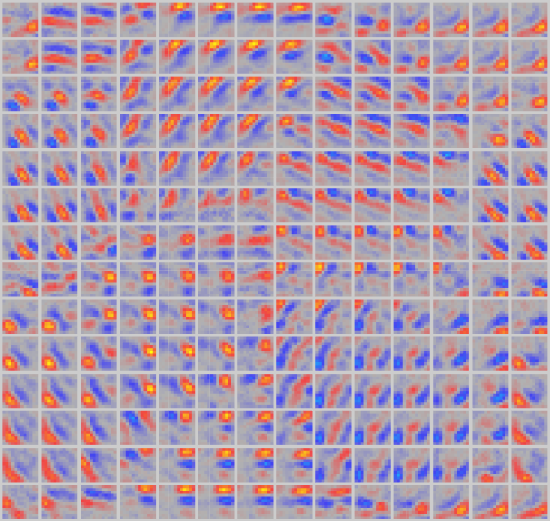
Open V1Rf to explore the development of oriented edge detectors in V1. This model gets exposed to a set of natural images, and learns to encode oriented edges, because they are the statistical regularity present in these images. Figure 6.9 shows the resulting map of orientations that develops.
{kind=link}