
4.4: When, Exactly, is there an Outcome that should Drive Learning
- Page ID
- 12583


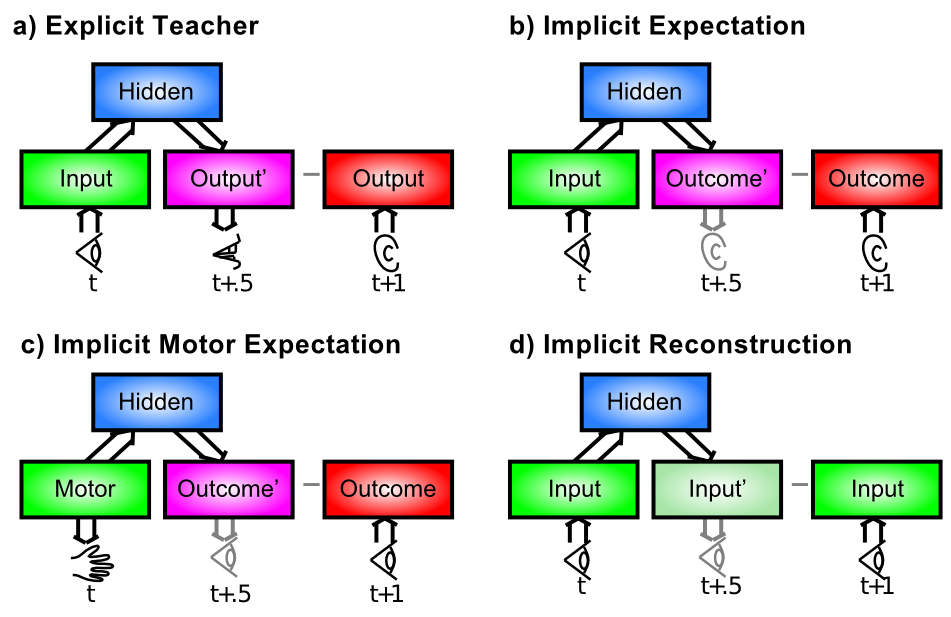
This is the biggest remaining question for error-driven learning. You may not have even noticed this issue, but once you start to think about implementing the XCAL equations on a computer, it quickly becomes a major problem. We have talked about how the error-driven learning reflects the difference between an outcome and an expectation, but it really matters that the short-term average activation representing the outcome state reflects some kind of actual outcome that is worth learning about. Figure 4.12 illustrates four primary categories of situations in which an outcome state can arise, which can play out in myriad ways in different real-world situations.
{kind=link}
In our most recent framework described briefly above, the expectation-outcome timing is specified in terms of the 100 msec alpha trial. And within this trial, the combined circuitry between the deep neocortical layers and the thalamus end up producing an outcome state that drives predictive auto-encoder learning, which is basically the last case (d) in Figure 4.12, with an extra twist that during every 100 msec alpha trial, the network attempts to predict what will happen in the next 100 msec -- the predictive aspect of the auto-encoder idea. Specifically, the deep layers attempt to predict what the bottom-up driven activity pattern over the thalamus will look like in the final plus-phase quarter of the alpha trial, based on activations present during the prior alpha trial. Because of the extensive bidirectional connectivity between brain areas, the cross-modal expectation / output sequence shown in panel (b) of Figure 4.12 is also supported by this mechanism. A later revision of this text will cover these ideas in more detail. Preliminary versions are available: (O'Reilly, Wyatte, & Rohrlich, 2014; Kachergis, Wyatte, O'Reilly, Kleijn, & Hommel, 2014).
Another hypothesis for something that "marks" the presence of an important outcome is a phasic burst of a neuromodulator like dopamine. It is well established that dopamine bursts occur when an unexpected outcome arises, at least in the context of expectations of reward or punishment (we'll discuss this in detail in the Motor Control and Reinforcement Learning Chapter). Furthermore, we know from a number of studies that dopamine plays a strong role in modulating synaptic plasticity. Under this hypothesis, the cortical network is always humming along doing standard BCM-like self-organizing learning at a relatively low learning rate (due to a small lambda parameter in the combined XCAL equation, which presumably corresponds to the rate of synaptic plasticity associated with the baseline tonic levels of dopamine), and then, when something unexpected occurs, a dopamine burst drives stronger error-driven learning, with the immediate short-term average "marked" by the dopamine burst as being associated with this important (salient) outcome. The XCAL learning will automatically contrast this immediate short-term average with the immediately available medium-term average, which presumably reflects an important contribution from the prior expectation state that was just violated by the outcome.
There are many other possible ideas for how the time for error-driven learning is marked, some of which involve local emergent dynamics in the network itself, and others that involve other neuromodulators, or networks with broad connectivity to broadcast an appropriate "learn now" signal. From everything we know about the brain, there are likely several such learning signals, each of which being useful in some particular subset of situations. This is an active area of ongoing research.